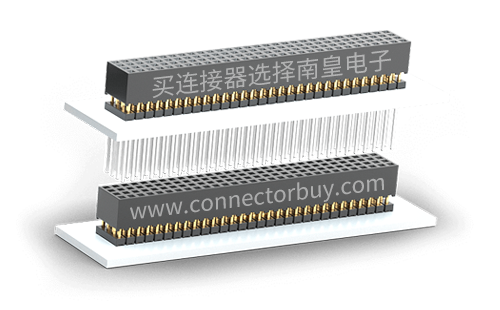
1CAN������RS-485��������
�I�B�����W��ע����ȫ���|Samtec�B�����F؛�������YԴ���LJ����I�ȵ�TE��̩����ӣ�TYCO����Molex��Ī�ˣ���JAE��JST��FCI��Samtec����̩����Amphenol�����M�Z���B������ُ����ƽ�_���p�ɝM�������B������ُ����
CAN����(ControllerAreaNetwork)���ɵ�Bosch��˾��20���o80������T����܇��ӿ���ϵ�y�_�l��һ�N���Д���ͨ�Ņf�h���e�m�ϑ����ڷֲ�ʽ���ƻr�����I�����đ��÷����鼰���پW�j�͵ͳɱ��ķֲ�ʽ����ϵ�y��CAN�����������c:
(1)�o�Ɖĵ��������ș���ٲ�;
(2)����վ�c�������ȼ��M�п����L��;
(3)������e�`�z�y�ͽ綨;
(4)֧���h�̔���Ո��;
(5)�������՞V���Ķ��ַ������;
(6)ͨ�Ž��|���ӣ��M�Ϸ�ʽ�`��;
(7)ȫϵ�y�������ݣ�ϵ�y�`��;
(8)���h��ݔ���x��10Km(������ݔ���ʞ�5kbps)������ݔ���ʞ�1Mbps(������ݔ���x��40m)��
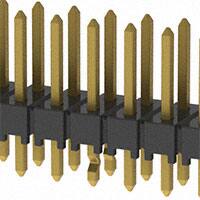
RS-485�˜�������EIA(��ӹ��I�ϕ�)�����Ĵ���ͨ�Ņf�h������RS-232C�˜���̖��ݔ���x�L���ٶȿ졢���ɔ_���ܺã��V�������ڸ��N���I�������Դ���I���ڌ��H�����У��S��I�����O��(��PLC)������RS-485�ӿڡ���ˣ��б�Ҫ�OӋCAN�����cRS-485������ͨ�Žӿ��·��
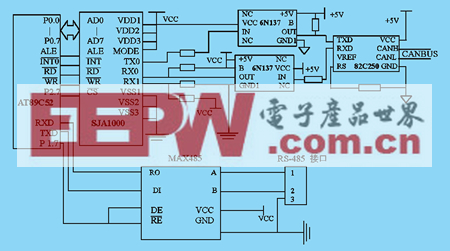
2Ӳ���OӋ
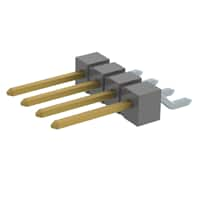
����ͨ�Žӿ��·�Ɇ�Ƭ�CAT89C52��CAN������SJA1000��CAN�հl��82C250�����ٹ�������6N137��RS-485�հl��MAX485�M�ɡ�����Ƭ�CAT89C52��Ҫ���SJA1000�ij�ʼ������CAN������RS-485����֮�g�Ĕ���ͨ���΄ա�SJA1000��CAN������82C200������aƷ������Ҫ�����й���ģ�K����:�ӿڹ���߉���l�;��_�������վ��_���������^�V����λ��̎������λ�r��߉���e�`����߉�������c82C200����֮�⣬���������S���¹���:PeliCAN����ģʽ���x/���L�����e�`Ӌ�������˜ʺ͔Uչ�Y����Ϣ�Ľ��պͰl�͡��ɾ��̵��e�`���ƈ�ֻ ģʽ���ٲÁGʧ�Дࡣ��Ƭ�C��SJA1000�Ȳ��Ĵ����Ŀ��������L���ⲿ�Ĵ����ķ�ʽ�M�еġ�CAN�հl��82C250��CAN��������������������֮�g�Ľӿڣ���Ҫؓ؟�ṩ�������IJ�ְl�������͌�CAN�������IJ�ֽ����������������_8(RS)����3�N��ͬ�Ĺ�����ʽ���x��:���C��б�ʿ��ƺ��١�
(1)�oRS���ϸ��ƽ���t82C250�Ե�������C��ʽ����;
(2)��RSͨ�^�B�����ӵأ��t�M��б�ʿ��Ʒ�ʽ��ԓ��ʽ����ͨ�^��׃������ֵ���{��б�ʣ��m���ڵ��ٺ��^�̵Ŀ����L�ȵđ��È���;
(3)���RS�ӵأ����x���˸��ٹ�����ʽ�����ٹ�������6N137���F��CAN���������հl��֮�g��늚���x��������ϵ�y�ķ����ԺͿ��ɔ_������RS-485�հl��MAX485��һ�N���ƽ���͵�С�����հl��������һ��������һ����������ʹ�Æ�+5V�Դ��늣����T����TTL�f�h(��ͨ���ڸ���CPU��ͨ�Ņf�h)��485�˜�֮�g����D�Q��ʹ��������������RS-485����ͨ�Ņf�hֱ���M�д���ͨ�š�
�����D�Q�^�̿ɷ֞�:CAN�����D�Q��RS-485������RS-485�����D�Q��CAN������CAN�����D�Q��RS-485��������������:���������յ�CAN�������c�l�͵Ĉ��ģ�����CAN����Ҏ���Ĕ�����ʽȡ�����ĵ�������Ϣ��Ȼ����������ͨ�^MAX485����Ϣ�l�͵�RS-485��������RS-485�����D�Q��CAN�����t���������̵����^�̡�
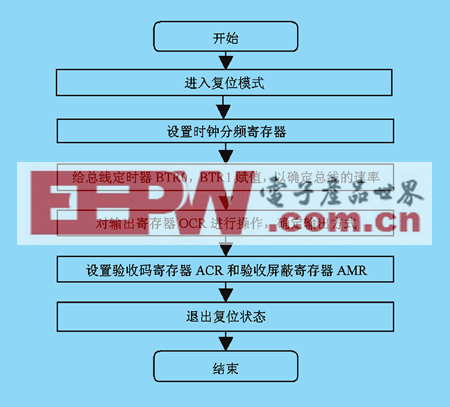
3ܛ���OӋ
ܛ���OӋ����Ҫ�΄��nj��F�����Ϳ���������CAN�����W�j��RS-485����֮�g�Ă�ݔ������Ҫ����RS-485��CAN�ӿڵij�ʼ�������İl�ͺͽ��ճ����Д���ճ�����e�`̎������ȡ����У�SJA1000�ij�ʼ��������ܛ���OӋ�е��y�c����Ҫ��ɸ��N�����������O�á����У����ƼĴ����Á���׃CAN���������О飬�����M���λ��B�����ͬ��͵��Д�Դ��������Дࡢ�l���Д�͔�������Д�ȡ���մ��a�Ĵ�����������μĴ�����ͬ���ö��x���ܱ����c�����Ո��ĵėl��:������Ϣ�Ę��R��������λ�c��մ��a�Ĵ�����մa������λ��ȡ�������μĴ����������Ǵ_����մa����Щλ������՞V�������P�Ļ����P�ġ������r��Ĵ���0���x�˲����ʵ��A�Oֵ��ͬ�����D����;�����r��Ĵ���1�t���x��λ���ڵ��L�ȡ��ɘ��c��λ�úͲɘӔ�Ŀ��ݔ�����ƼĴ��������O�ò�ͬ��ݔ��ģʽ(������ݔ��ģʽ���p��ݔ��ģʽ�͕r�ݔ��ģʽ��)���r犷��l�Ĵ������H���Կ���SJA1000��ݔ���l�ʼ�����CLKOUT���_������߀�܉�BasicCAN��PeliCANģʽ�M���x���w��SJA1000��ʼ���������̡�
CAN�����D�Q��RS-485�����ij�������:
CAN-RS485_TR
ANSITION:
MOVDPTR,#SR;��B�Ĵ���
MOVXA,@DPTR;
JNBACC.0,CAN_QUIT;
�Ƿ���յ���Ϣ���o�����t�˳��D�Q����
CAN-RS485_HANDLE:
MOVDPTR,#CANR;���վ��_�^��ַ
MOVXA,@DPTR;���Վ��ĸ�ʽ
JNBACC.6,RECEIVE_FRAME
;RTR=1�t�������h��Ո��
LCALLTRANSMIT_DATA
;�l�͌���Ո��Ĕ���
LJMPCAN_QUIT;�˳��D�Q����
RECEIVE_FRAME:MOVXA,@DPTR;
ANLA,#0FH;
ADDA,#05H
;�@�ý��Ք������L��
MOVR7,A
MOVR0��#43H
;�O��MCU���Ք������_�^
DATAFRAME:MOVXA,@DPTR
;���Ք���
MOV@R0,A
LCALLRS485_SEND;����Ч��Ϣͨ�^MAX485�D�l��RS-485����
INCDPTR
INCR0
DJNZR7,DATAFRAME;�Д�����Ƿ�Y��
RECOUT:MOVDPTR,#CMR
MOVA,#04H
;ጷŽ��վ��_�^
MOVX@DPTR,A
CAN_QUIT:RET;�˳��D�Q����
4�Y���Z
CAN�����Ǯ�ǰ�������V���ĬF������֮һ����RS-485�����t�dz��õĴ��п���������֮�g����D�Q���кܸߵČ��Ãrֵ�������OӋ��CAN-RS485ͨ�Žӿ��·�܉�ܺõؽ�Q�@�ɷN���Д�������֮�g����D�Q���}�����ѳɹ�������ij�^�����ܽ�ͨ����ϵ�y��
Samtec�پW�������|����Ϣ�YԴ���ИI�YӍ�������_�l�������YӍ��Ϣƽ�_��